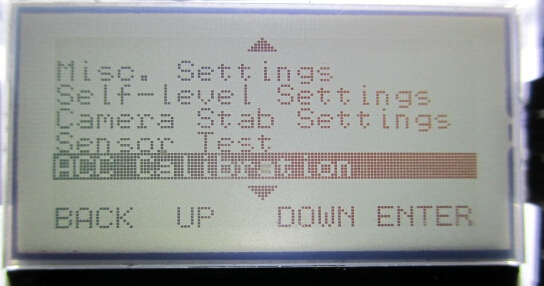
主菜单第二项是“PI感度编辑器”PI Editor。按DOWN到达这个项目然后按ENTER则进入如下界面:

光标停在Axis后面时,可以按CHANGE改变对哪个轴进行设置(滚转、俯仰、自旋)。按NEXT或者PREV将光标移动到数字上面,可以改变数值。默认情况下滚转和俯仰的设置是关联的,修改其中之一,另一个跟着变。
这里稍做介绍,所有飞控的PI调整都是类似的意思,大家可以找到很多资料。一般都采用先将I Gain调到0,然后将P Gain尽可能调大,直到悬停时飞机开始高频“抖动”,然后降低一点P到不抖。然后调高I,直到悬停时飞机开始“晃动”(频率比“抖”低),然后降低一点I到不晃。
P Limit和I Limit可以不做调整,保持默认值即可。
初次飞行可以使用如下默认设置:
Roll/Pitch Axis:
Pgain = 150 Plimit = 100
Igain = 50 Ilimit = 20
Yaw Axis:
Pgain = 150 Plimit = 20
Igain = 50 Ilimit = 10
7、设置飞行模式开关。
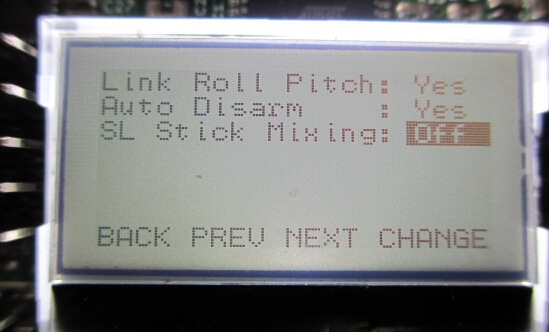
从主菜单进入“Mode Settings”。这里面有“SL Stick Mixing”,可以选择LOW, MEDIUM或者HIGH。这表示在“杆回中自动平衡”模式下,回中后多快自动平衡,越高越快。建议先用Medium体验一下再调。
设置好后,拨动第五通道开关,主屏幕SAFE下面的Self-Level后面会显示不同的模式。
8、试飞!
装上螺旋桨,拨动第五通道开关,保证SAFE屏幕显示Self-Leve: OFF:要先调非平衡模式。
将油门收到底,方向舵打到最右几秒钟,屏幕显示ARM。轻推油门,螺旋桨旋转后观察飞机运动方向,如果有任意轴向的异常且越来越加剧运动,立刻收油,降落,将方向舵打到最左,回归SAFE界面。
应该是某通道的纠正方向错误,客通过Mix Editor菜单,进入该通道,进行设置。
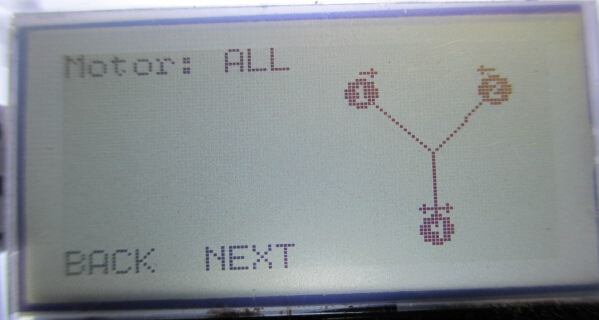
以V尾四轴为例,目前设置的是通道4。这个界面表示,当摇控器发出指令时,第四通道如何工作。
Throttle:120,有油门指令时,该通道的电机会按照120%的指令旋转,因为尾电机比前面两个电机小一号,所以这里设置120,而前两个都是100。如果猛推油门加速上升时发现飞机低头抬尾向前飞,那么就是这个120太大了。
Aileron:0,有副翼指令时,该电机保持原状不跟着变化。
Elevator:-90,尾电机的转速快慢能够让飞机发生俯仰变化,所以有升降舵指令时,这里-90。
Rudder:100,V尾两个尾电机的转速快慢,还令飞机发生自旋运动转向,所以有方向舵指令时,这里100。在我的三轴上,这个数字曾经是-100,数值的正负可以造成动作的反向。
Offset:-10,如果悬停时有某个轴向的缓慢偏移运动,就调这里。V尾悬停时会慢慢向左旋转,修改了这里就没问题了。

一切正常可以飞行时,再调整PI感度。
9、非自平衡模式调好了,就可以试试自平衡模式了。
自平衡模式起飞后,无风条件下应该保证水平不飘,如果有飘,则进入Self-level settings里修改。
自平衡模式也有感度可以调。
10、特技飞行。
在V1.6++的自平衡模式下,实际上是“摇杆回中自平衡”,也就是说,在摇杆量很大的时候,处于特技模式。你现在可以试验一下,悬停到一定高度,猛打摇杆到最大,看看飞机是不是跑得很快,然后立刻松开摇杆,飞机应立刻自动恢复水平。但是你会发现,摇杆到最大,飞机也不会“翻”。。
这是因为,有一个“摇杆比率”Stick Scaling设定值很低,此时默认都是30:

从主菜单进入Stick Scaling界面,逐个通道尝试,将数值增大。对于3轴和V尾而言,数值到100时,飞机上升到10米以上,杆打到最大,翻滚的速度能够保证不会坠到地面。此数值越大,翻滚越快。
同样我们会发现,这个数值大了之后,轻微拨动摇杆飞机会运动剧烈,不利于控制。这个时侯可以在发射机上设置各个通道的EXPO曲线,使摇杆处于中立位置附近时,输出比较平缓。