


图片实拍盗图必究
CUAV雷迅 SKYE 2代智能空速计
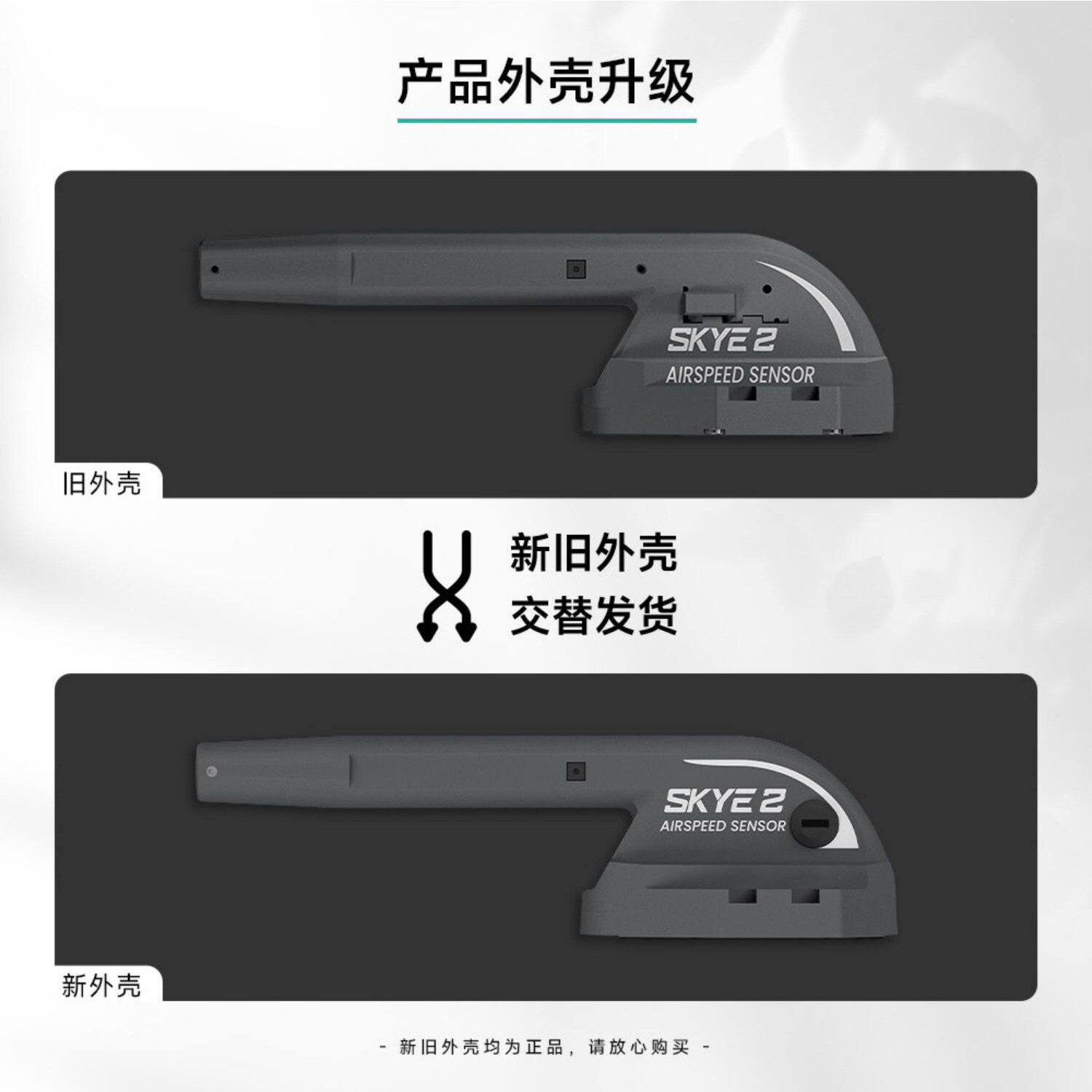
温馨提醒:
亲爱的顾客,为提升产品质感,我们正在逐步升级产品外壳。在此过渡期间,新老版本将随机发货。两者仅在外部细节上有所不同,核心功能和品质均无差异。若您对版本有特定要求,请谨慎下单。感谢您的支持与理解!







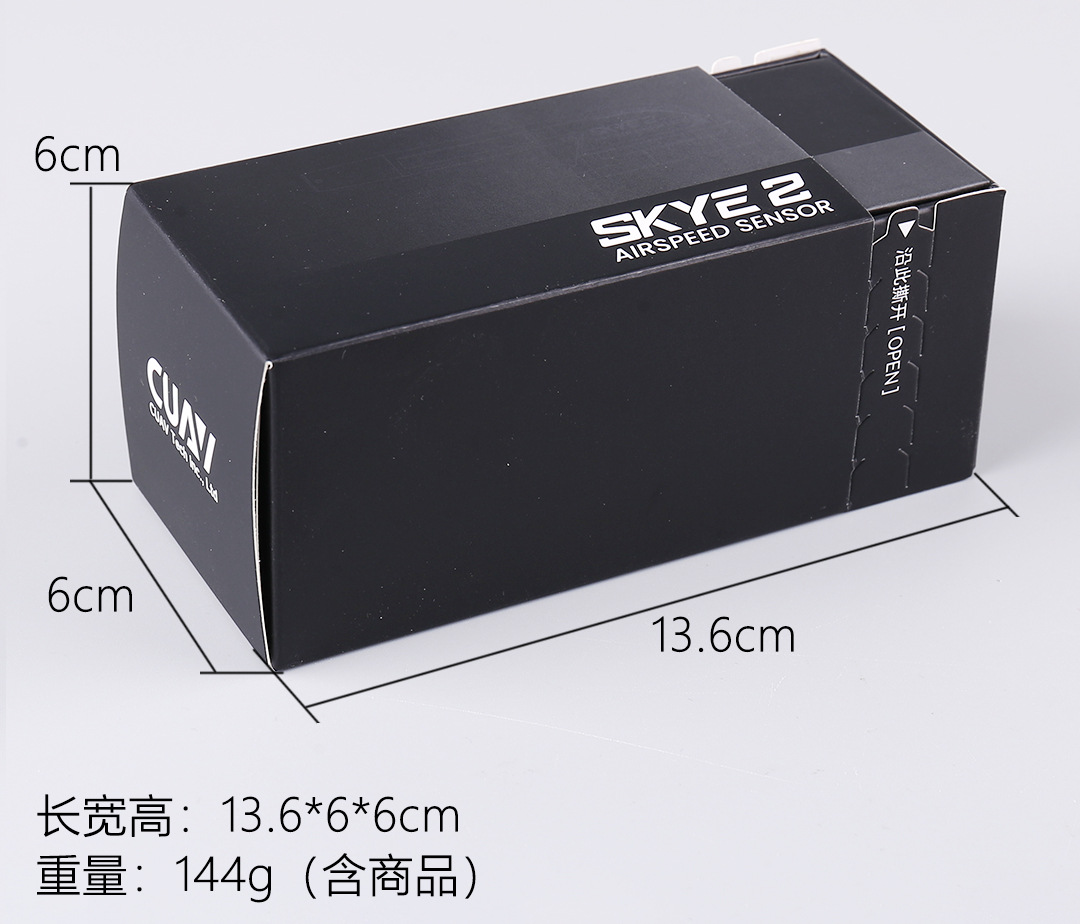
产品尺寸及重量(手工测量)






引脚定义

硬件连接
SKYE2不兼容SKYE HUB,请选择使用SKYE2HV HUB。

温湿度数据
Ardupilot4.30及以上版本固件支持温湿度计数据显示:

空速置零(校准空速偏移)
当无风状态下,空速显示大于33m/s.请在起飞前进行空速置零
方法:
-打开Mission planner软件并连接飞行控制器
-确保当前空速管处于无风环境
-打开Mission planner>飞行数据>动作栏
-在第一复选框中选择‘“PreflightCalibration'55;点击右侧
“执行动作“按钮

飞行前检查
飞行前请连接上地面站检查无风状态下,确保空速值在0~3m/s之
间的范围内跳动(超出范围请进行空速置零)

用手托住空速管,往空速管吹气,查看空速数值能够根据气流速
度变化,则表示检查完成。

空速校准
不同的安装及不同空速计个体的空速比例会有些差异,在第一次
飞行需进行空速计校准;将飞行控制器参数ARSPD_AUTOCAL设置
为1开启自动校准执行校准((以下两种方式二选一)
1.以(QStabilize或QLoiter多轴模式升空并转换为FBWA(自稳A
模式)控制无人机飞行盘旋5圈左右,地面站消息栏提示校准完
成后,执行降落。22.如果您不会使用FBWA模式飞行,可以采用
使能空速计但不使用空速计的方法飞行((ARSPD USE=1::ARSPD_T
YPE=8;请勿在风速较大的环境下进行此操作);飞机将使用地
速(相对地面速度)飞行,起飞后使用Loiter模式盘旋5圈左右
7地面站消息栏提示校准完成后,执行降落。







产品展示









| 수입신고 1USD |
구매/결제대행 1CNY |
TT송금 1CNY |
|---|---|---|
| 6.23 CNY | 222.66 KRW | 0.145 USD |






